 |
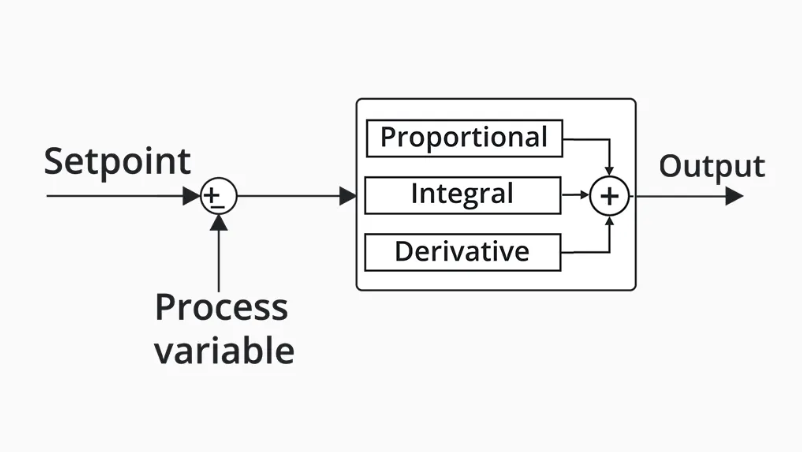
| A Typical PID Block |
In the world of robotics, few challenges are as satisfying—and as frustrating—as balancing a legged robot. Quadrupeds, in particular, lie in that elegant middle ground between the stability of hexapods and the agility of bipeds. And when it comes to controlling them, many engineers instinctively reach for modern tools like reinforcement learning or model predictive control.
But there’s something timeless, almost poetic, about using a good old PID controller. It’s like tuning a musical instrument—simple in theory, yet endlessly nuanced in practice.
Let’s explore the underrated elegance of PID control and how it can turn an unstable, jittery quadruped into a smooth, balanced walker.
1. What is a PID Controller, Really?
At its core, a PID controller adjusts a system’s output based on three terms: Proportional (P), Integral (I), and Derivative (D). Think of it as a system that tries to correct an error—say, the tilt angle of your robot’s body—by looking at how bad the error is, how long it’s been there, and how fast it’s changing.
The basic form of a PID controller is:
Unlike wheeled robots, quadrupeds must manage dynamic balance. That means responding in real-time to shifts in weight, external pushes, or terrain changes.
Here’s where PID shines:
i. Real Time Response
The proportional term kicks in immediately when an error occurs—like when the robot starts to tilt forward. This fast correction stabilizes the system in milliseconds.
ii. Eliminating Steady-State Errors
Sometimes, the robot might consistently lean a few degrees forward due to an unbalanced load. The integral term gradually corrects for this persistent error, ensuring the robot stands perfectly upright over time.
iii. Smoothing Oscillations
The derivative term adds damping. Without it, your quadruped might "overreact" to errors, causing oscillations or jittering in its movements. With a well-tuned D term, the motion becomes smoother and more natural.
3. Tuning the PID Controller
PID tuning is more art than science, especially with systems as nonlinear as legged robots. Here’s a common tuning method that works well for many roboticists:
- Start with Kp: Gradually increase the proportional gain until the robot reacts quickly but doesn't oscillate violently.
- Add Kd: Introduce derivative gain to dampen the system and reduce overshoot.
- Finally Ki: Add integral gain to correct long-term drift or biases but be careful—it can make your system unstable if set too high.
4. Quadruped Balancing
Balancing a quadruped is fundamentally a problem of dynamic equilibrium—keeping the robot’s center of mass (CoM) within the base of support formed by its legs. And to understand why PID is effective, we need to briefly touch on the physics behind balancing.
When your quadruped tilts forward, backward, or sideways, what’s actually happening is a torque imbalance about its body axes.
Let’s say the robot tilts forward. Gravity creates a torque trying to rotate it further. That torque is:
- T is the torque due to gravity
- m is the robot's mass
- g is gravitational acceleration
- d is the horizontal distance from the COM to the pivot (support line)
To maintain balance, actuators in the legs (or spine) must apply equal and opposite torque to counteract this.
So, when we use sensors like IMUs to detect changes in pitch or roll, we’re really measuring this imbalance—i.e., the error signal for the PID controller to act upon.
Basically, the COM of the quadruped must lie in the area formed by the contact polygon, that is the shape formed connecting all the points of the robot touching the ground.
 |
| Contact Polygon and COM of a Quadruped |
 |
| Algorithm Implemented in CERBRUS |
 |
| Demo of PID Balancer in Cerbrus |
In an era where neural networks and optimal control dominate the landscape, PID remains a pillar of practical control systems. It’s interpretable, computationally lightweight, and most importantly—it works.
The beauty of PID isn’t just in the math. It’s in its adaptability to the real, imperfect world. For quadruped robots, especially in the early prototyping phase, PID can bring balance—literally and figuratively—without the need for expensive sensors or heavy computation.
7. Conclusion
Balancing a quadruped might seem like black magic when you’re just starting out. But sometimes, the most elegant solution is also the simplest. The PID controller, with its humble roots in industrial control, continues to prove its worth in advanced robotics.
If you’re building a legged robot, give PID a try. It might not be flashy—but it just might surprise you with how far it can take you.
"A PID controller is like a tightrope walker—P is the instinct to correct a lean, I is the memory of your past imbalance, and D is your ability to predict how fast you're falling."
LINK to CERBRUS GITHUB: Mandred009/CERBRUS-OpenSource-Quadruped: An Open-Source Quadruped Robot with a Front-Mounted Gripper Inspired by Ant Morphology.
LINK to YOUTUBE DEMO: https://youtu.be/7aDOSGi9X7s?si=KN2XfEcmaIdSimpA
Check out other blogs for more info on CERBRUS or on some cool robotics concepts.
FUTURE BEYOND OUR STAR !
Comments
Post a Comment